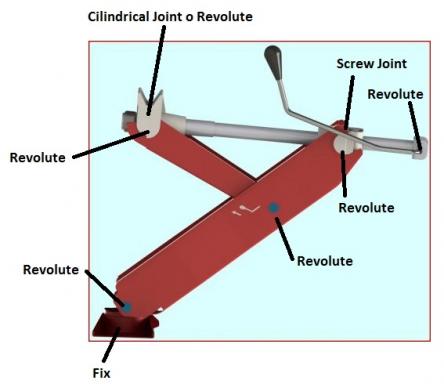
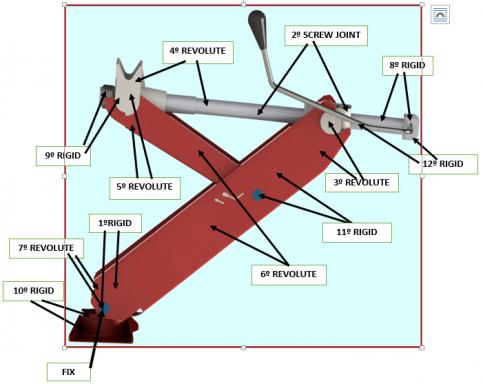
hola, tengo que hacer mover el gato mecanico, he usado los revolute joints para los 4 ejes , luego el screw para la rosca con la pieza de teflon blanca de la derecha y un gear para el eje que une los dos brazos y el eje que une el brazo pequeño con la pieza de teflon de la izquierda, pero no me funciona.
Podriais aconsejarme como usar los joints para hacer funcionar el gato?
gracias